
Термин «координация» происходит от латинского coordinatio — взаимоупорядочение. Под координацией движений понимают процессы согласования активности мышц тела, направленные на успешное выполнение двигательной задачи.
Для центральной нервной системы объектом управления является опорно-двигательный аппарат. Своеобразие скелетно-мышечной системы заключается в том, что она состоит из большого числа звеньев, подвижно соединенных в суставах, допускающих поворот одного звена относительно другого. Суставы могут позволять звеньям поворачиваться относительно одной, двух или трех осей, т. е. обладать одной, двумя или тремя степенями свободы. Чтобы в трехмерном пространстве достичь любой заданной точки (в пределах длины конечности), достаточно иметь двухзвенную конечность с двумя степенями свободы в проксимальном суставе («плече») и одной степенью свободы в дистальном («локтевом»). На самом деле конечности имеют большее число звеньев и степеней свободы. Поэтому, если бы мы захотели решить геометрическую задачу о том, как должны изменяться углы в суставах, для того чтобы рабочая точка конечности переместилась из одного заданного положения в пространстве в другое, мы обнаружили бы, что эта задача имеет бесконечное множество решений. Чтобы кинематическая цепь совершала нужное движение, необходимо исключить те степени свободы, которые для данного движения являются избыточными. Этого можно достичь двумя способами: I) можно зафиксировать избыточные степени свободы путем одновременной активации антагонистических групп мышц (коактивация); 2) можно связать движения в разных суставах определенными соотношениями, уменьшив таким образом число независимых переменных, с которыми должна «иметь дело» центральная нервная система. Такие устойчивые сочетания одновременных движений в нескольких суставах, направленных на достижение единой цели, получили название синергий.
Весьма своеобразны и «двигатели», используемые в живом организме. Скелетные мышцы представляют собой эластомеры с нелинейной зависимостью развиваемой силы от частоты активации. При этом развитие силы автоматически сопровождается изменениями упругости и вязкости мышцы. Кроме того, как известно, напряжение мышцы зависит от ее длины (угла в суставе) и скорости удлинения или укорочения. Сложность управления движениями в суставах при помощи мышц усугубляется еще и тем, что на каждую степень свободы, как правило, приходится больше одной пары мышц. При этом многие мышцы являются двухсуставными, т. е. действуют не на один, а на два сустава. Поэтому, например, сгибание пальцев руки невозможно без одновременной активации разгибателей кисти, препятствующих действию сгибателей пальцев в лучезапястном сочленении.
Формы участия мышц в осуществлении двигательных актов весьма многообразны. Анатомическая классификация мышц (например, сгибатели и разгибатели, синергисты и антагонисты) не всегда соответствуют их функциональной роли в движениях. Так, некоторые двухсуставные мышцы в одном суставе осуществляют сгибание, а в другом — разгибание. Антагонист может возбуждаться одновременно с агонистом для обеспечения точности движения, и его участие помогает выполнять двигательную задачу. В связи с этим, учитывая функциональный аспект координации, в каждом конкретном двигательном акте целесообразно выделить основную мышцу (основной двигатель), вспомогательные мышцы (синергисты), антагонисты и стабилизаторы (мышцы, фиксирующие, не участвующие в движении суставы). Роль мышц не ограничивается генерацией силы, антагонисты и стабилизаторы часто функционируют в режиме растяжения под нагрузкой. Этот режим используется для плавного торможения движений, амортизации толчков.
На конечный результат движения влияют не только силы, развиваемые мышцами, но и силы немышечного происхождения. К ним относятся силы инерции, создаваемые массами звеньев тела, вовлекаемых в движение, а также силы реакции, возникающие в кинематических цепях при смещении любого из звеньев. Движение смещает различные звенья тела друг относительно друга и меняет конфигурацию тела, а следовательно, по ходу движения изменяются моменты упомянутых сил. Вследствие изменения суставных углов меняются и моменты мышечных сил. На ход движения влияет и масса звеньев тела; моменты сил тоже изменяются в процессе движения из-за изменения ориентации звеньев относительно вектора силы тяжести. В практической деятельности человек вступает во взаимодействие с предметами внешнего мира — различными инструментами, перемещаемыми грузами н т. д., и ему приходится преодолевать силы тяжести, упругости, трения, инерции, возникающие в процессе этого взаимодействия. Немышечные силы вмешиваются в процесс движения и делают необходимым непрерывное согласование с ними деятельности мышечного аппарата. Необходимо также нейтрализовывать действие непредвиденных помех движению, которые могут возникать во внешней среде, и оперативно исправлять допущенные в ходе реализации движения ошибки.
В связи с перечисленными особенностями скелетно-мышечной системы н условиями ее взаимодействия с внешним миром, управление движениями оказывается немыслимым без решения задачи согласования активности большого числа мышц.
Характер этого согласования зависит от двигательной задачи. Так, если нужно взять стакан с водой, то для формирования такого движения центральная нервная система должна располагать информацией о положении стакана относительно тела и о исходном положении руки. Однако, поскольку мы хотим, чтобы это движение
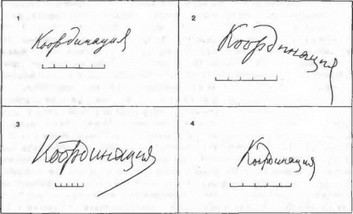
Рис. 4.17. Реализация программы письма разными группами мышц (по Н. А. Бернштейну).
I — нормальная скоропись пальцами правой руки; 2 — карандаш удерживается зубами; 3 — карандаш прикреплен к носку ботинка правой ноги; 4 — карандаш удерживается пальцами левой кисти. Отметка масштаба внизу каждого факсимиле — 5 см.
было успешным, кисть заранее раскрылась на величину, соответствующую размеру стакана, чтобы сгибатели пальцев сжимали стакан с силой, достаточной для предотвращения проскальзывания, чтобы приложенная сила была достаточной для плавного подъема, но не вызывала резкого отрыва, чтобы ориентация стакана в кисти после захвата все время была вертикальной, т. е. чтобы реализация движения соответствовала двигательной задаче, то необходимы не только данные о пространственных соотношениях, но н разные сведения о свойствах объекта манипулирования. Многие из этих сведений не могут быть получены в ходе самого движения посредством обратных связей, а должны быть заложены в программу предстоящего движения на этапе его планирования. Предполагают, что двигательная память содержит обобщенные классы двигательных программ, из числа которых в соответствии с двигательной задачей выбирается нужная. Эта программа модифицируется применительно к конкретной ситуации: однотипные движения могут выполняться быстрее или медленнее, с большей или меньшей амплитудой. Одна и та же программа может быть реализована разными наборами мышц. В качестве примера на рис. 4.17 приведены образцы почерка при написании слова «координация» правой и левой рукой, а также карандашом, зажатым в зубах, или прикрепленным к носку ботинка. Размышление над этим примером приводит нас к важному выводу о том, что уровень планирования движения н уровень его исполнения не совпадают, иначе говоря, система управления движениями является многоуровневой. Действительно, произвольное пространственно ориентированное движение планируется в терминах трехмерного эвклидового пространства: вверх—вниз, вперед—назад, вправо—влево. Для выполнения этого плана необходимо перевести планируемые линейные перемешения в соответствующие угловые переменные (изменения суставных углов), определить, какие мышечные моменты необходимы для этих угловых перемещений, и, наконец, сформировать двигательные команды, которые вызовут активацию мышц, дающую необходимые значения моментов.
В планировании, преобразовании и исполнении двигательной программы участвуют различные структуры нервной системы, организованные по иерархическому принципу. Двигательная программа может быть реализована различными способами. В простейшем случае центральная нервная система посылает заранее сформированную последовательность команд к мышцам, не подвергающуюся во время реализации никакой коррекции. В этом случае говорят о разомкнутой системе управления. Такой способ управления используется при осуществлении быстрых, так называемых баллистических движений. Чаще всего ход осуществления движения сравнивается с его планом на основе сигналов, поступающих от многочисленных рецепторов, н в реализуемую программу вносятся необходимые коррекции — это замкнутая система управления с обратными связями. Однако и такое управление имеет свои недостатки. Вследствие относительно малой скорости проведения сигналов, значительных задержек в центральном звене обратной связи и времени, необходимых для развития усилия мышцей после прихода активирующей посылки, коррекция движения по сигналу обратной связи может запаздывать. Поэтому во многих случаях целесообразно реагировать не на отклонение от плана движения, а на само внешнее возмущение еще до того, как оно успело вызвать это отклонение. Такое управление называют управлением по возмущению.
В осуществлении координации движений участвуют все отделы центральной нервной системы — от спинного мозга до коры большого мозга. У человека двигательные функции достигли наивысшей сложности в результате перехода к прямостоянию н прямохождению (что осложнило задачу поддержания равновесия), специализации передних конечностей для совершения тонких движений, использования двигательного аппарата для коммуникации (речь, письмо). В управление движениями человека включены высшие формы деятельности мозга, связанные с сознанием, что дало основание называть соответствующие движения произвольными.
На спинальном уровне протекают лишь простейшие координации, тем не менее спинной мозг может осуществлять довольно обширные функции, вплоть до «спинального шагания» у животных (Ч. Шер- рингтон). Нервные механизмы ствола мозга существенно обогащают двигательный репертуар, обеспечивая координацию правильной установки тела в пространстве за счет шейных и лабиринтных рефлексов (Р. Магнус) и нормального распределения мышечного тонуса. Важная роль в координации движений принадлежит мозжечку. Такие качества движения, как плавность, точность, необходимая сила, реализуются с участием мозжечка путем регуляции временных, скоростных и пространственных характеристик движения. Животные с удаленными полушариями, но с сохраненным стволом мозга по координации движений почти не отличаются от интактных. Полушария мозга (кора и базальные ядра) обеспечивают наиболее тонкие координации движений: двигательные реакции, приобретенные в индивидуальной жизни. Осуществление этих реакций базируется на работе рефлекторного аппарата ствола мозга и спинного мозга, функционирование которых многократно обогащается деятельностью высших отделов центральной нервной системы.
Механизмы координации движений, роль тех или иных отделов ЦНС в управлении движениями изучаются чаще в опытах на животных, однако объектом исследования естественных движений является преимущественно человек, что обусловлено двумя обстоятельствами. Во-первых, человек в зависимости от задачи исследования может воспроизводить любую требуемую форму двигательной деятельности. Во-вторых, движения человека являются проявлением его поведения и трудовой деятельности и поэтому представляют особый интерес как с теоретической точки зрения вследствие их сложности и дифференцированности, так и с практической — в связи с их значением для медицины, физиологии труда, космонавтики, эргономики, физиологии спорта.
Методы исследования движений человека. Многообразие методических приемов, используемых при изучении координации движений человека, можно разделить на две группы. Одна группа методов ориентирована на получение сведений о процессах, лежащих в основе координации движений, путем регистрации внешних двигательных проявлений. Другие методы связаны с непосредственной регистрацией управляющих сигналов, поступающих к мышцам в процессе двигательной активности (электромиография), с регистрацией афферентных сигналов (микронейронография), изменений ЭЭГ, предшествующих началу движения.
Для регистрации механических параметров движения — траекторий, скорости, ускорения, развиваемой силы (механограмм) используют технику превращения неэлектрнческих величин в электрические с помощью различных датчиков. Так, с помощью тензодатчиков можно непосредственно измерять и регистрировать силу, прилагаемую к тому или иному инструменту, или реакции опоры при ходьбе, с помощью резистивных датчиков на основе потенциометров — регистрировать изменения суставных углов при движении. Дифференцирование сигналов с помощью электронных дифференциаторов или ЭВМ позволяет одновременно с записью перемещения получать запись скорости и ускорения.
При анализе механических параметров движения может быть использован принцип циклографии — регистрации последовательных моментов движения путем фотосъемки движущегося человека через равные промежутки времени на неподвижную пластинку. Если на суставах или точках, соответствующих положению центров тяжести звеньев тела, укреплены светящиеся лампочки, то по такой записи — циклограмме, можно восстановить траекторию движения. В настоящее время чаще используются специализированные компьютерные системы регистрации движения с непосредственным вводом в ЭВМ изображений с двух телекамер, образующих стереопару. Решая обратную задачу механики по записям кинематических параметров (если известно распределение масс), можно рассчитать возникающие при движении силы, моменты в суставах, работу и мощность.
Движения глаз можно регистрировать электрически (электро- окулография), с помощью контактных линз (внутри них располагается виток проволоки, в котором наводится напряжение при повороте витка в магнитном поле) и другими методами.
Анализ работы мышц при совершении двигательного акта осуществляется с помощью электромиографии. При электромиографи- ческом исследовании движений обычно используют накожные электроды, укрепляемые над исследуемой мышцей. Многоканальный электромиограф дает возможность одновременно записывать элек- тромиограммы нескольких мышц. Амплитуда электромиографиче- ского сигнала возрастает с увеличением развиваемой мышцей силы, поэтому электромиограммы в сопоставлении с регистрируемыми синхронно механограммами позволяют судить о силе сокращения мышц и о распределении их активности в последовательных фазах двигательного акта.
Набор средств изучения нейронных механизмов управления движениями на человеке включает регистрацию сухожильных рефлексов и рефлекса Гофмана (Н-рефлекс), дающих оценку уровня возбудимости двигательных нейронов спинного мозга в разные фазы движения. Позже стала возможной регистрация через кожу головы электрических потенциалов различных областей головного мозга, сопутствующих или предшествующих движению (потенциалы готовности). В последние годы разработаны методы неповреждающей стимуляции отдельных областей коры мозга человека с помощью чрезвычайно кратковременных импульсов высокого напряжения (электрическая стимуляция) или кратковременных и очень сильных магнитных полей, создаваемых индуктивными катушками, укрепленными над разными областями головы и индуцирующими электрические поля, достаточные для стимуляции мозговых структур (магнитная стимуляция).
Физиология движений изучает роль сигналов от различных рецепторов в планировании и осуществлении движений и поддержании позы. Среди них есть как простейшие — закрывание глаз, так и более сложные — использование призматических очков, смещающих или переворачивающих изображения окружающего мира, специальных систем, позволяющих вызвать у человека иллюзию движения зрительного окружения. Значение вестибулярного аппарата можно изучать в условиях его гальванической или калорической стимуляции, а также при искусственном изменении величины и направления вектора силы тяжести — на центрифуге, в условиях кратковременной или длительной невесомости. Посту-
пающис от мышцы проприоцептивные сигналы можно менять, прикладывая к ее сухожилию вибрацию, вызывающую активацию рецепторов мышечных веретен.
С помощью описанных методов изучены такие сложные естественные двигательные акты, как ходьба, бег, рабочие и спортивные движения. Многие из этих методов используются в клинике при исследованиях нарушений двигательной функции вследствие поражения нервной системы или опорно-двигательного аппарата.
Ходьба и бег. Ходьба является наиболее распространенной формой локомоции человека (локомоция — активное перемещение в пространстве на расстояния, значительно превышающие размеры тела). Она относится к циклическим двигательным актам, при которых последовательные фазы движения периодически повторяются.
Для удобства изучения и описания цикл ходьбы подразделяют на фазы: для каждой ноги выделяют фазу опоры, в течение которой нога контактирует с опорой, и фазу переноса, когда нога находится в воздухе. Фазы опоры двух ног частично перекрываются по времени, образуя двухопорный период. Центр масс тела человека при ходьбе совершает сложные пространственные движения. Амплитуда этих движений составляет около 5 см в направлении вверх—вниз и
- 4 см в боковом направлении. Наиболее низкое положение центра масс соответствует двухопорному периоду, а наиболее высокое — середине одноопорного периода. Давление на опору во время ходьбы непостоянно. Оно превышает вес тела во время динамических толчков и меньше веса тела в середине одноопорного периода. Ходьба здорового человека характеризуется симметрией движений левой и правой сторон. Фаза опоры начинается с момента соприкосновения пятки с опорой, нога при этом полностью разогнута. Перенос нагрузки на эту ногу сопровождается подошвенным сгибанием стопы и подгибанием в коленном суставе. За счет этих угловых движений в начале фазы опоры происходит «присваивание» стопы к опоре. В записи опорных реакций в это время отмечают первый максимум — передний динамический толчок. Задний динамический толчок соответствует отталкиванию задней ноги от опоры и осуществляется главным образом мышцами голеностопного сустава и в меньшей степени коленного и тазобедренного суставов. В осуществлении ходьбы участвуют также мышцы спины (рис. 4.18). Наибольшая активность мышц наблюдается в фазу опоры. При этом за счет одновременной активности сгибателей и разгибателей нога становится опорной, способной нести вес тела.
Сопоставление изменений межзвенных узлов в тазобедренном, коленном и голеностопном суставах с распределением по времени активности мышц приводит к выводу, что движение ноги в фазу переноса в значительной степени осуществляется за счет сил инерции подобно двухзвенному маятнику.
Анализ работы мышц при ходьбе показывает, что в разные фазы шага они сокращаются в разных режимах — концентрическом, т. е. с укорочением (мышцы, осуществляющие подошвенное сгибание стопы в опорном периоде), эксцентрическом, т. е. с удлинением
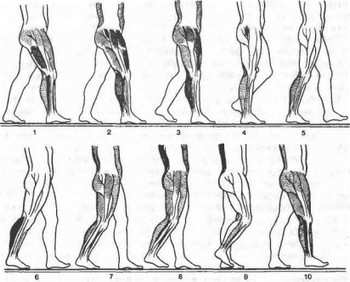
Рис. 4.18. Последовательные положения ног при ходьбе. Показано участие различных мышц в осуществлении движений конечностей.
I, 2 — двухопорный период первого шага; 6, 7 — двухопорный период второго шага; 3—5 и 8—10 — одноопорные периоды. Интенсивность штриховки мышц соответствует силе их сокращений.
(передняя большеберцовая мышца во время «присваивания» стопы обеспечивает плавность ее опускания на опору), изометрическом, т. е. без изменения длины (мышцы тазобедренного сустава во время переката через пятку).
Повторяемость параметров движений в последовательных циклах при ходьбе не абсолютная: движения обладают некоторой вариабельностью. Наименьшая вариабельность у кинематической картины ходьбы, наибольшая — в работе мышц, проявляющаяся в изменениях электромиограмм от цикла к циклу. Это отражает корригирующую деятельность ЦНС, которая при каждом шаге вносит в стандартную структуру ходьбы поправки, необходимые для обеспечения относительного постоянства ее кинематики.
Бег отличается от ходьбы тем, что нога, которая находится позади, отталкивается от опоры раньше, чем другая опускается иа эту опору. В результате в беге имеется безопорный период — период полета. В беге благодаря большим, чем при ходьбе, скоростям перемещения более значительную роль играют баллистические компоненты движения — перемещение звеньев ноги по инерции.
Рабочие движения. Рабочими движениями в широком смысле слова могут быть названы самые разные целенаправленные движения, совершаемые как в процессе труда, так и в повседневной жизни.
У человека основным рабочим органом является рука, причем для выполнения двигательной задачи обычно наиболее важно положение кисти, которая в результате движения должна в определенный момент оказаться в определенном месте пространства. Благодаря большому числу степеней свободы верхней конечности кисть может попасть в нужную точку по разным траекториям и при различных соотношениях углов в плечевом, локтевом и лучезапястном суставах. Это многообразие возможностей позволяет выполнять двигательную задачу, начиная движение из различных исходных поз, и в то же время ставит ЦНС перед сложной задачей выбора одного варианта из многих.
Электромиографические исследования ряда рабочих движений показали сложную картину работы мышц, однако в этой картине часто можно выделить устойчивые сочетания активности некоторых мышц, используемые в различных движениях. Это синергии, основанные на врожденных или выработанных в процессе опыта связях, которые, являясь устойчивыми компонентами движений, упрощают управление сложными двигательными актами и помогают преодолеть избыточность числа мышц и количества степеней свободы.
При совершении одного и того же, даже простого, движения организация мышечной деятельности в сильной степени зависит от вмешательства немышечных сил, в частности, внешних по отношению к человеку. Так, при ударе молотком, когда к массе предплечья добавляется масса молотка, и, следовательно, возрастает роль инерции, разгибание предплечья совершается по типу баллистического движения — мышцы-разгибатели активны только в начале разгибания, которое дальше совершается по инерции, а в конце притормаживается мышцами-антагонистами. Аналогичное по кинематике движение при работе напильником (рис. 4.19), когда основная внешняя сила — трение, совершается путем непрерывной активности мышцы на протяжении всего разгибания. Если первое из этих двух движений является в основном предпрограммированным, то во втором велика роль обратных связей.
Поза. У млекопитающих животных и человека поддержание позы обеспечивается теми же фазическими мышцами, что и движения, специализированные тонические мышцы отсутствуют. Отличие заключается в том, что при «позной» деятельности сила сокращения мышц обычно невелика, режим близок к изометрическому, длительность сокращения значительна. В «позный», или постуральный, режим работы мышц вовлекаются преимущественно низкопороговые, медленные, устойчивые к утомлению двигательные единицы.
Одна из основных задач «позной» деятельности мышц — удержание нужного положения звеньев тела в поле силы тяжести (удержание головы от свисания, голеностопных суставов от тыльного сгибания при стоянии и др.). Кроме того, «позная» активность может быть направлена на фиксацию суставов, не принимающих участия
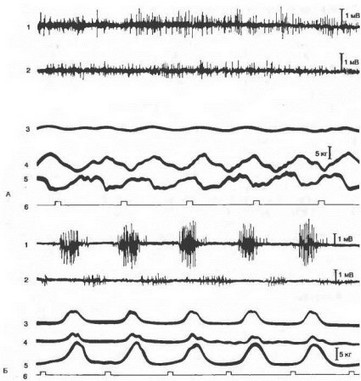
Рис. 4.19. Электромиогрвммы и механограммы, регистрируемые при опиловке.
А — до обучения; Б — после двухнедельного обучения; 1— электромиограммя трехглавой мышцы плеча; 2 — электромиограммя двуглавой мышцы плеча; 3 — 5 — регистрация усилий, прилагаемых к напильнику, вниз, в сторону и вперед; б — калибровка времени, равная I с.
в осуществляемом движении. В трудовой деятельности удержание позы бывает связано с преодолением внешних сил.
Типичный пример позы — стояние человека. Сохранение равновесия при стоянии возможно в том случае, если проекция центра тяжести тела находится в пределах опорного контура, т. е. площади, занимаемой на плоскости опоры стопами (рис. 4.20). Вертикаль, опущенная из общего центра тяжести тела, при стоянии проходит несколько впереди оси голеностопных и коленных суставов и несколько позади оси тазобедренных. Следовательно, на эти суставы действуют моменты сил тяжести вышерасположенных звеньев тела, а это делает необходимым для удержания позы стояния напряжение многих мышц туловища и ног. Развиваемая этими мышцами сила
Рис. 4.20. Площадь опоры тела в удобной стойке -
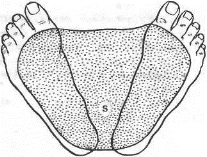 S — точка, соответствующая проекции общего центра тяжести тела.
S — точка, соответствующая проекции общего центра тяжести тела.
невелика. Максимальное напряжение при стоянии развивают мышцы голеностопного сустава, меньшее — мышцы коленного и тазобедренного суставов. У большинства мышц активность поддерживается на более или менее постоянном уровне. Другие, например передняя большеберцовая мышца, активируются периодически. Последнее обусловлено небольшими колебаниями центра тяжести тела, постоянно происходящими при стоянии как в сагиттальной, так и во фронтальной плоскостях. Эти колебания могут быть зарегистрированы специальным прибором — стабилографом, работающим с помощью тензодатчиков (рис. 4.21). Мышцы голени противодействуют отклонениям тела, возвращая его в вертикальное положение. Таким образом, поддержание позы — это активный процесс, осуществляющийся, как и движение, с участием обратных связей от рецепторов. В поддержании вертикальной позы участвуют зрение и вестибулярный аппарат. Важную роль играет проприоре- цепция.
Поза стояния у человека энергетически относительно экономна, так как моменты силы тяжести невелики вследствие близости проекции тяжести тела к осям основных суставов ног. Менее экономно стояние у многих животных, например у кошки и собаки, которые стоят на полусогнутых конечностях.
Поддержание равновесия при стоянии — только частный случай «позной» активности. Механизмы поддержания равновесия используются также при локомоции и повседневной двигательной деятельности. Например, быстрое движение руки может вызывать нарушение равновесия. Обычно этого не происходит, потому что произвольному движению предшествуют такие изменения в системе регуляции позы, которые заранее изменяют распределение «позной» активности мышц и тем самым обеспечивают нейтрализацию по-
Jl0 мм
I 1 1 1 i J 1 1 1 1 1 П I I I I 1 i_
Г лаза открыты Глаза закрыты глаза открыть|
Рис. 4. 21. Записи колебаний тела человека в сагиттальной (А) и фронтальной (Б) плоскостях при стоянии (стабилограммы). Отметка времени — 5 с.
следствий движения — так называемые позные компоненты произвольного движения. Эта упреждающая «позная» активность осуществляется автоматически с очень короткими центральными задержками. Роль упреждающей активности в стабилизации положения звеньев тела можно проиллюстрировать простым примером: студент удерживает на ладони вытянутой руки учебник физиологии. Если его товарищ внезапно снимет эту книгу с ладони, то рука резко подпрыгнет вверх, если же студент сам снимет книгу свободной рукой, то ладонь останется на прежнем уровне.
К понятию позы примыкает понятие мышечного тонуса. Термин «тонуо многозначен, в применении к скелетным мышцам им обозначают комплекс явлений. В покое мышечные волокна обладают тургором (упругостью), определяющим их сопротивление давлению и растяжению. Тургор составляет тот компонент тонуса, который не связан со специфической нервной активацией мышцы, обусловливающей ее сокращение. Однако в естественных условиях большинство мышц обычно в некоторой степени активируется нервной системой, в частности, для поддержания позы («позный тонус»). Полное расслабление мышцы, когда электромиографическим методом не регистрируется никаких потенциалов действия, достигается только в условиях полного покоя и при исключении задачи поддержания позы в поле силы тяжести (исследуемая часть тела лежит на опоре).
Другой важный компонент тонуса — рефлекторный, определяется рефлексом на растяжение. При исследовании на человеке он выявляется по сопротивлению растяжения мышцы в случае пассивного поворота звена конечности в суставе. Если в процессе такого исследования записать электромиограмму, то в растягиваемой мышце регистрируется электрическая активность, свидетельствующая об активации двигательных единиц. У здорового человека рефлекс на растяжение при пассивном движении наблюдается только в процессе самого растяжения и притом в случае достаточно большой скорости растяжения. Тонический компонент рефлекса на растяжение, т. е. активность в растянутой мышце, обычно отсутствует, о чем можно судить по отсутствию электромиографического сигнала.
Выработка двигательных навыков. Совершенствование двигательной функции человека в процессе онтогенеза происходит как вследствие продолжающегося в первые годы после рождения созревания отделов нервной системы и врожденных механизмов, участвующих в координации движений, так и в результате обучения, т. е. формирования новых связей, ложащихся в основу программ тех или иных конкретных двигательных актов. Координация новых, непривычных движений имеет характерные черты, отличающие ее от координации тех же движений после обучения.
Обилие степеней свободы в опорно-двигательном аппарате, влияние на результат движения сил тяжести и инерции осложняют выполнение любой двигательной задачи. На первых порах обучения нервная система справляется с этими трудностями, нейтрализуя помехи путем развития дополнительных мышечных напряжений.
Мышечный аппарат жестко фиксирует суставы, не участвующие в движении, активно тормозит инерцию быстрых движений. Такой путь преодоления помех, возникающих в ходе движения, энергетически невыгоден и утомителен. Использование обратных связей еще несовершенно — коррекционные посылки, возникающие на их основе, несоразмерны и вызывают необходимость повторных дополнительных коррекций.
На электромиограммах видно, что мышцы-антагонисты даже тех суставов, в которых совершаются движения, активируются одновременно, при этом в циклических движениях мышцы почти не расслабляются. Возбуждены также многие мышцы, не имеющие прямого отношения к данному двигательному акту. Движения, совершаемые в таких условиях, напряжены и неэстетичны (например, движения человека, впервые вышедшего на коньках на лед).
Как показал в своих исследованиях Н. А. Бернштейн, по мере обучения вырабатывается такая структура двигательного акта, при которой немышечные силы включаются в его динамику, становятся составной частью двигательной программы. Излишние мышечные напряжения при этом устраняются, движение становится более устойчивым к внешним возмущениям. На электромиограммах видна концентрация возбуждения мышц во времени и пространстве, периоды активности работающих мышц укорачиваются, а количество мышц, вовлеченных в возбуждение, уменьшается. Это приводит к повышению экономичности мышечной деятельности, а движения делаются более плавными, точными и непринужденными (см. рис. 4.19).
Важную роль в обучении движениям играет рецепция, особенно проприорецепция. В процессе двигательного обучения обратные связи используются не только для коррекции движения по его ходу, но и для коррекции программы следующего движения на основе ошибок предыдущего.
Утомление. При длительной физической работе наступает утомление, которое, в частности, проявляется в изменении координации мышечной деятельности. Возбуждение каждой работающей мышцы становится менее локализованным во времени. В работу вовлекаются другие мышцы, сначала синергисты, компенсирующие снижение силы основных мышц, а затем, по мере нарастания дискоордина- ции — и другие мышцы, в частности антагонисты. Движения становятся менее точными, темп их замедляется.
Картина мышечной активности во время движений, совершаемых на фоне утомления, во многом напоминает картину, наблюдаемую при выполнении новых, непривычных движений.
Нарушения координации движений. Поскольку в управлении движениями принимают участие многие отделы ЦНС, нарушения координации движений Moiyr быть использованы в целях диагностики. Они проявляются нарушениями устойчивости при стоянии и ходьбе, асимметрией движений правой и левой стороны, нарушениями точности движений, снижением силы и уменьшением скорости. Регистрация пространственных и временных характеристик движений с их количественным представлением дает возможность оценить степень двигательных расстройств при различных заболеваниях, ход восстановления двигательных функций, предложить эффективные методы двигательной реабилитации.